

为进一步拓宽师生学术视野,促进学术思想交流,助力学科交叉融合发展,近日,学院教师吴涛在信息与智能工程学院开展了题为《基于多模态融合的驾驶场景3D目标检测》的学术交流讲座。本次讲座聚焦自动驾驶领域核心技术难点,系统讲解多模态融合技术在3D目标检测中的应用,深入剖析前融合、深度融合、后融合三种核心方法,为在场师生带来了一场兼具专业性与实用性的学术分享,学院相关专业师生参加了本次讲座。
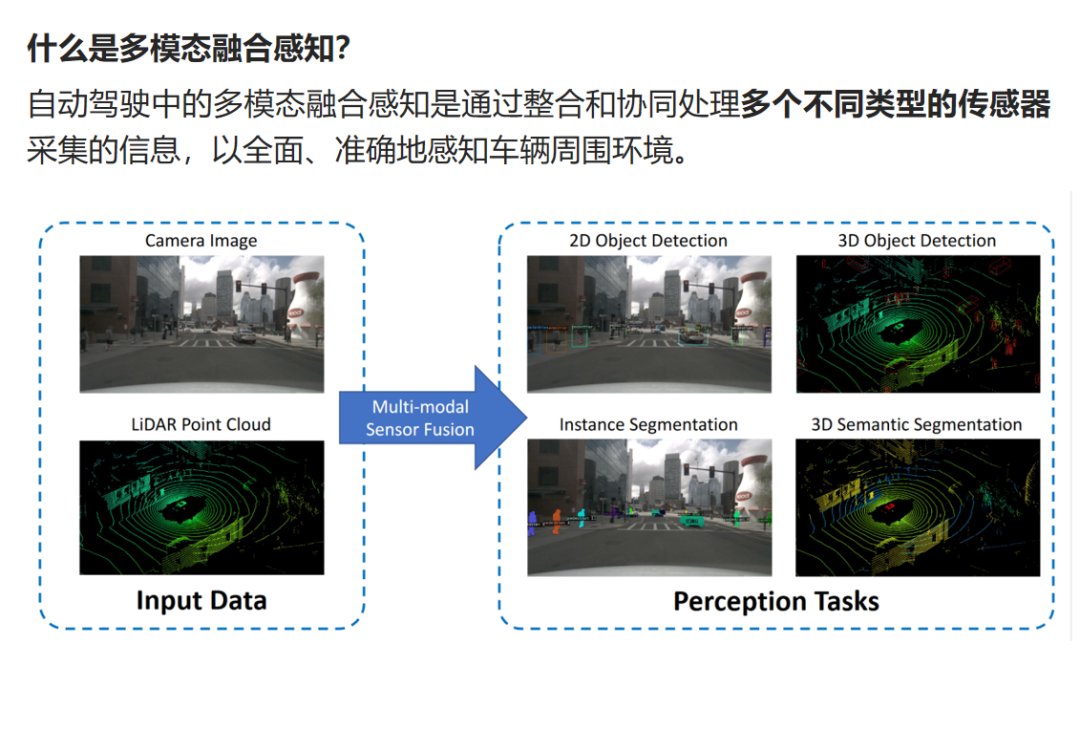
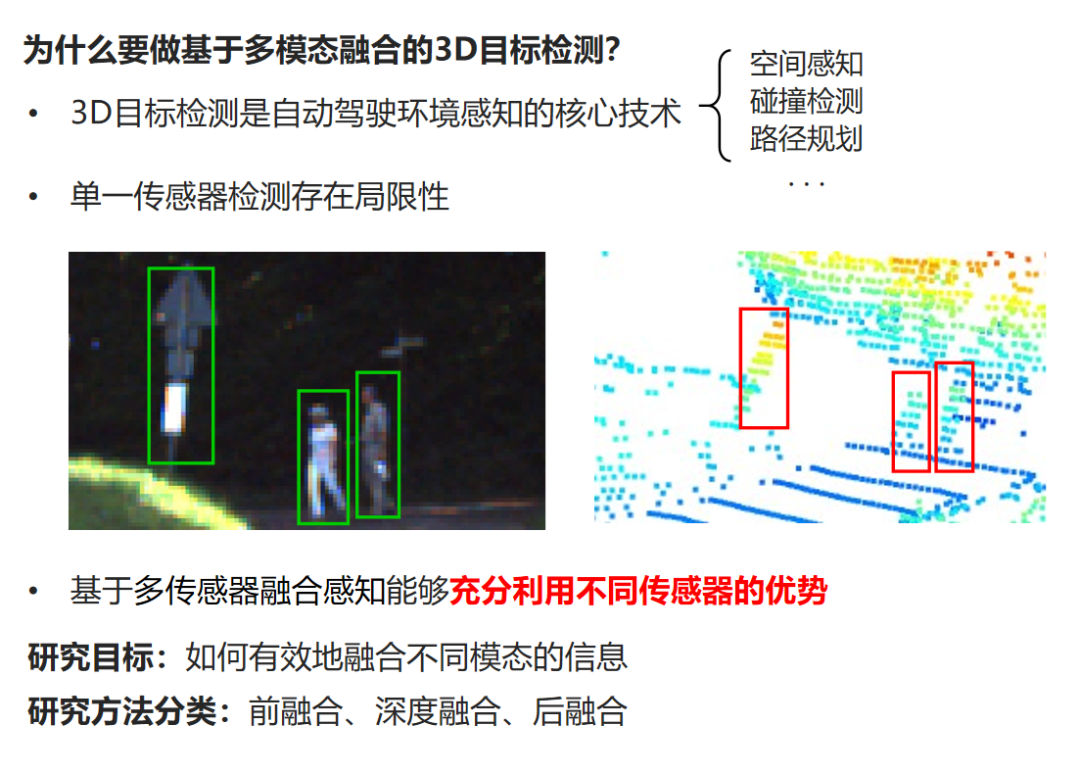
讲座伊始,吴涛老师结合当前自动驾驶产业向高阶迈进的发展现状,开篇点题,强调3D目标检测是保障自动驾驶安全行驶的核心环节。他指出,单一传感器(如摄像头、激光雷达)受环境、精度等限制,已难以满足复杂驾驶场景的检测需求,而多模态融合技术通过整合不同传感器的优势,能有效提升目标检测的精度、鲁棒性和实时性,是破解该领域技术难题的关键路径,引发在场师生的热烈讨论与深度共鸣。 随后,吴涛老师围绕多模态融合的核心逻辑,重点讲解了前融合、深度融合、后融合三种主流方法,结合驾驶场景实例层层拆解每种方法的原理、流程、优势及应用场景,用通俗类比让抽象的学术知识落地,帮助师生快速理解核心要点。
关于前融合方法,吴涛老师介绍,该方法在数据采集阶段就对不同模态数据(如图像数据、点云数据)进行统一预处理与对齐,实现数据层面的深度融合后再进行特征提取。他结合自身研究经验强调,前融合能最大限度保留原始数据细节、减少数据损失,在暴雨、强光等极端场景下表现突出,但对硬件算力和数据预处理技术要求较高,目前主要应用于高端自动驾驶原型系统中,同时提出了优化预处理效率的初步思路。
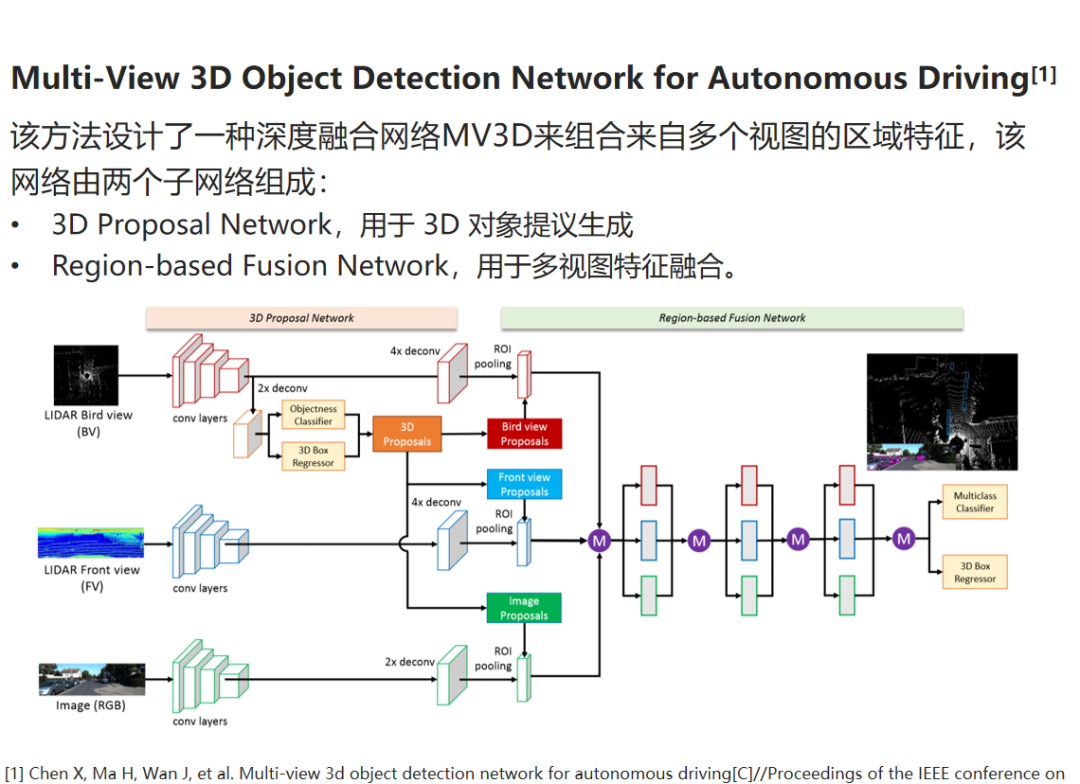
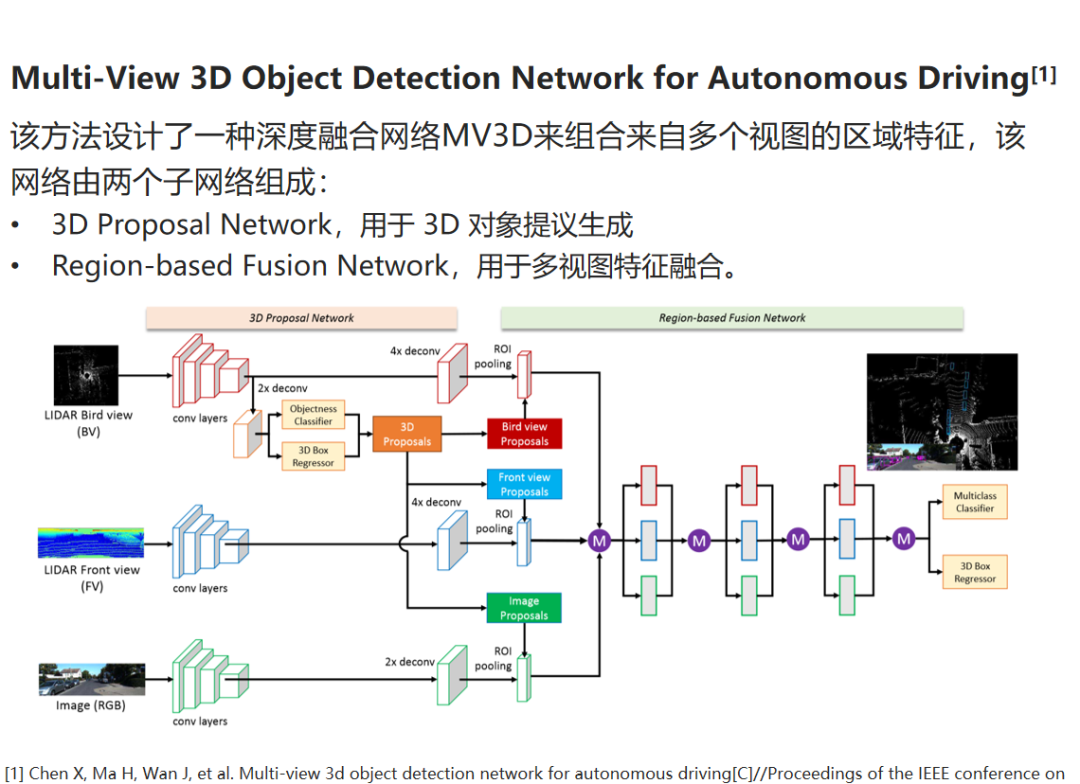
与前融合的数据层融合不同,深度融合更侧重特征层面的协同。吴涛老师结合具体算法案例,详细说明该方法通过构建统一融合网络,将不同模态数据提取的特征进行深度交互与融合,实现特征层面的协同优化。他表示,深度融合兼顾融合效果与计算效率,能充分发挥各模态数据的互补优势,是当前多模态融合3D目标检测的研究热点,已在多款量产自动驾驶车型的辅助驾驶系统中落地应用。
针对后融合方法,吴涛老师指出,该方法先对单一模态数据分别进行目标检测,再对各模态检测结果进行融合决策,具有结构简单、易于实现、兼容性强的特点,能快速适配不同类型的传感器组合。同时,他客观分析其局限性——易受单一模态检测误差影响,融合精度相对前融合和深度融合略低,更适合对实时性要求较高、算力有限的低成本自动驾驶场景。
讲座过程中,吴涛老师注重理论与实践深度结合,分享了多模态融合技术在驾驶场景3D目标检测中的最新研究进展、行业应用痛点及未来发展趋势,鼓励在场师生立足学科前沿,积极探索多模态融合与人工智能、大数据等技术的交叉应用,为相关领域科研创新注入新活力。 互动环节氛围浓厚,师生们积极提问,有同学就“深度融合在低算力设备上的优化路径”等问题与吴涛老师深入探讨。吴涛老师耐心拆解疑问,结合具体项目案例给出可落地的专业建议,进一步深化了师生对核心技术的理解。
此次学术讲座的成功举办,不仅系统普及了多模态融合技术在自动驾驶领域的核心知识,让师生们对3D目标检测技术形成更全面、深入的认知,更激发了师生的科研热情。下一步,信息学院将持续开展各类学术交流活动,邀请行业专家、骨干教师分享前沿学术成果,助力师生提升学术素养与科研能力,推动学科高质量发展。
一审一校 | 吴 涛
二审二校 | 杨 涛
三审三校 | 李成名 尹 娜

