

2025年1月31-2月4日,一场面向全国高校泛IT类相关专业教师的“AI嵌入式+机器人——SLAM从仿真到真机实战”专题研修班顺利举办。本次培训聚焦机器人核心技术——同步定位与地图构建(SLAM),通过“仿真先行,真机验证”的双轨教学模式,带领参训教师完成从理论认知到工程实践的全流程沉浸式学习,助力高校教师在智能机器人教学与科研领域实现能力跃升。智能工程系周显春老师参与了此次培训。
培训首日,参训教师从“环境搭建”模块入手,在讲师指导下完成了激光雷达的硬件组装与基础调试,并成功实现了真机建图功能,为后续的算法实战打下坚实的硬件基础。
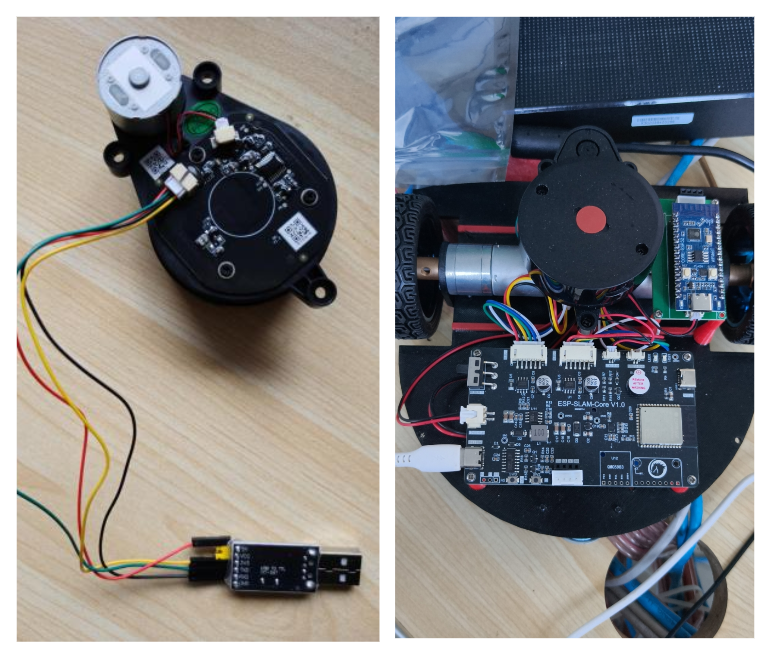
图1:在调试移动机器人激光雷达
进入第二、三天,“底层驱动”与“传感器数据处理”成为学习重点。教师们系统学习了IMU、电机、激光雷达等传感器的驱动原理与数据解析方法,并借助AI辅助编程工具提升代码编写与调试效率。通过实际动手操作,教师们掌握了机器人运动控制、里程计算与ROS节点通信等关键技能,实现了从硬件到数据的贯通理解。
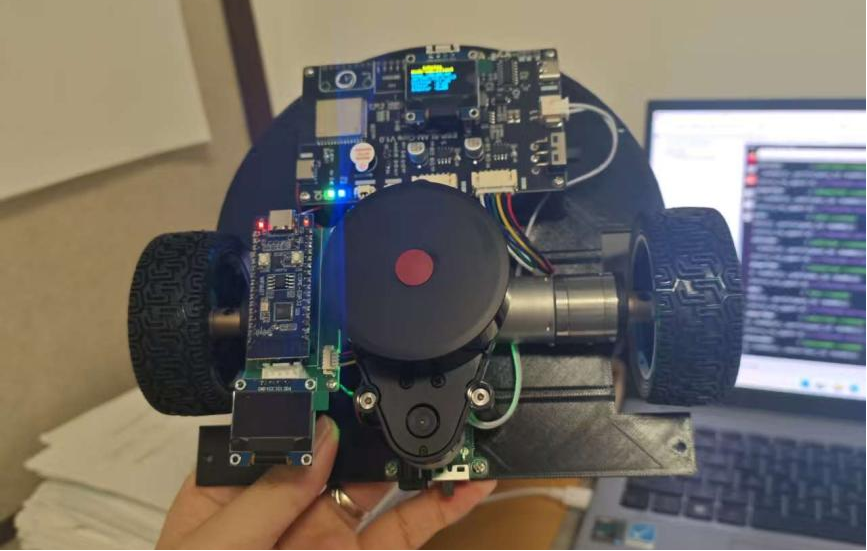
图2:通过ROS系统调试传感器数据流
第四、五天的课程核心转向“SLAM建图与仿真”。参训教师在Gazebo仿真环境中搭建了包含多传感器与动态障碍物的复杂场景,逐步实现激光雷达建图、回环检测与路径规划。通过RVIZ可视化工具,教师们可实时观测建图效果与机器人运动轨迹,直观理解算法性能与问题所在。
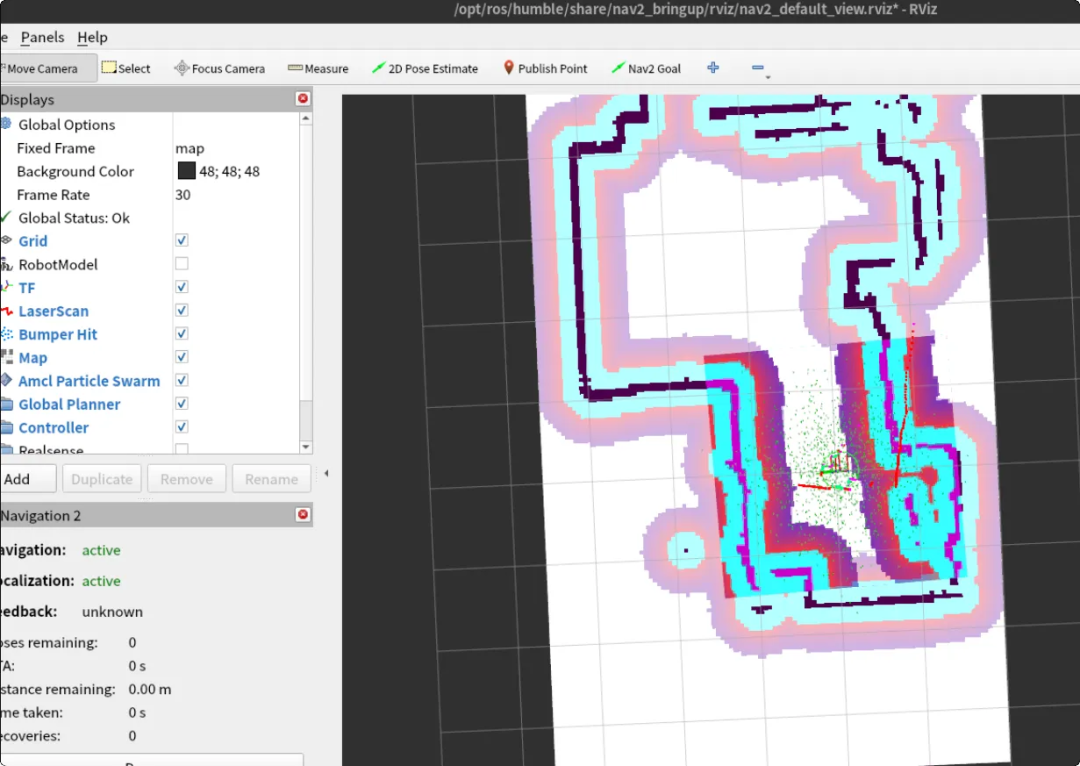
图3:通过RVIZ可视化工具实时观测建图效果
在仿真验证稳定后,培训进入最具挑战性的“真机部署”环节。教师们将仿真中调试完毕的SLAM系统迁移至真实机器人,学习处理传感器标定、时序同步、坐标系转换等现实问题,最终在真实环境中实现了稳定建图与自主导航,完成了从虚拟仿真到物理世界的“最后一公里”跨越。
本次培训强调“项目驱动、实战为主”,五天的紧凑学习不仅覆盖了SLAM全链路技术要点,更通过大量动手环节与“踩坑填坑”经验分享,使教师们在安全、高效的仿真环境中大胆试错,在真实机器人上谨慎验证,真正形成了“学得会、带得走、用得上”的工程能力。
培训结束后,参训教师纷纷表示,这种“仿真-真机”闭环的训练模式极具启发性,不仅提升了个人对SLAM技术的系统化理解与实操能力,也为今后开展机器人相关教学、科研与竞赛指导积累了宝贵的一手经验。
一审一校 | 周显春
二审二校 | 刘小飞
三审三校 | 李成名 尹 娜

